
工業機器人到底有多少種手?
2024-6-21新聞
隨著現代科學技術的發展,工業機器人已經開始成為在多種行業中廣泛使用的先進設備,在現代生產中發揮著重要作用。那么我們的工業機器人到底有多少種手,你知道嗎?

機器人的手部是指安裝于機器人的手臂末端,直接作用于工作對象的裝置。工業機器人所要完成的各種操作,最終都必須通過手部來得以實現。同時手部的結構、重量、尺寸對于機器人整體的運動學和動力學性能,又有著直接、顯著的影響。人體的手是具有許多關節的多個手指的手,可以巧妙的完成許多復雜的作業,如制作物品、使用工具、作各種手勢等。對于工業機器人來說,搬運物料是其抓取作業方式中較為重要的應用之一,其最大優勢可以重復的做同一動作在機械正常情況下永遠也不會覺得累!
01
02


03
04
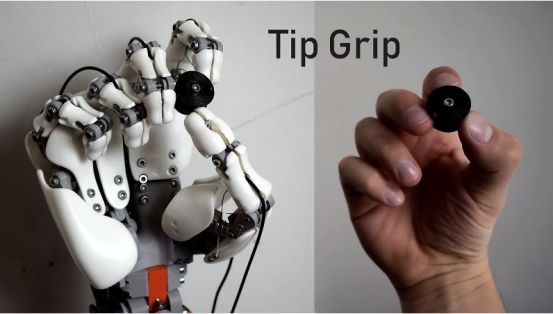
在千萬年來進化的過程中,人類的雙手變得極為靈活而神奇。二十七塊骨骼由肌肉和軟組織相連接,在肌肉的收縮和舒張作用下輕易地改變十指的姿態,從而完成寫字、演奏樂器乃至表演極為精妙的魔術等一系列動作。相比之下,機器人可謂非常笨拙了。簡單的工業機械手只適合完成夾持、拿取等幾種特定的動作,只能作為流水線上的一部分。但是運用類似的結構和固定在各個關節周圍的角度傳感器,仿生手的動作捕捉手套能夠將真正人手的關節旋轉角度轉化為電信號并傳給仿生手。從而能夠讓機械手實現和真手完全一致的動作。
05

06
